-

-

- 0755-8695 6431
聯系我們




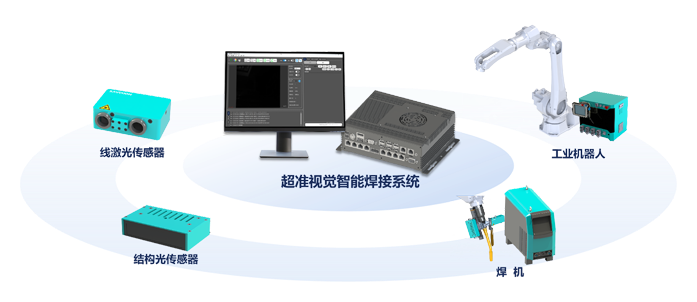
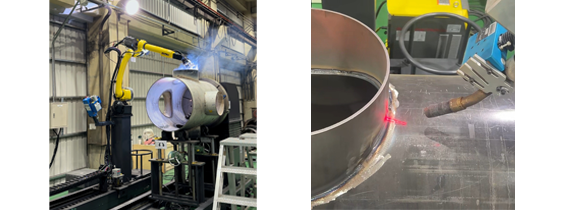
深圳市超準視覺科技所開發的 SAS 三維智能焊接視覺系統系列產品,能夠實現焊接過程中的焊縫實時識別及定位,并根據不同的焊縫類型提供焊縫特征數據。
SAS 視覺系統還向用戶提供快速手眼標定及坐標轉換工具,將相機坐標系內的焊縫位置及特征信息轉化為焊接機器人可用的世界坐標系數值。
利用 SAS 智能焊接三維視覺系統 , 配合焊接機器人,可輕松實現焊件尋位、焊縫尋跡、焊縫跟蹤等功能。
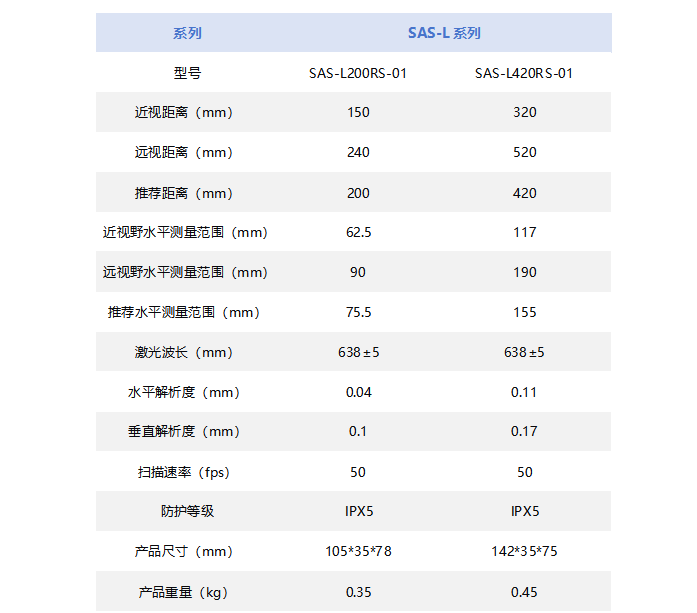
0.1mm 最小焊縫識別尺寸及 ± 0.05mm 焊縫位置測量精度
除焊縫類型,焊縫位置外,提供焊縫特征空間數據及快速手眼標定模塊
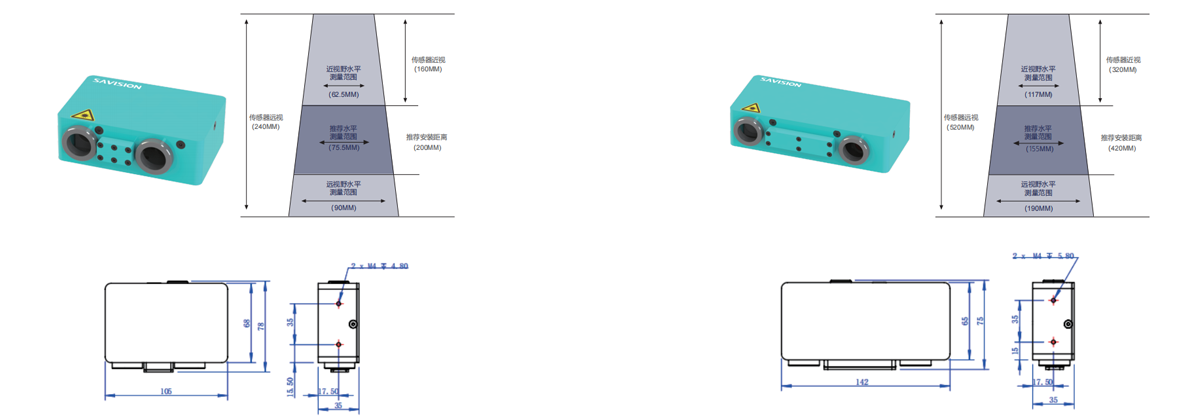
根據焊接現場需求配置硬件的最佳工作距離及導前距離
高達每秒 200 組數據輸出
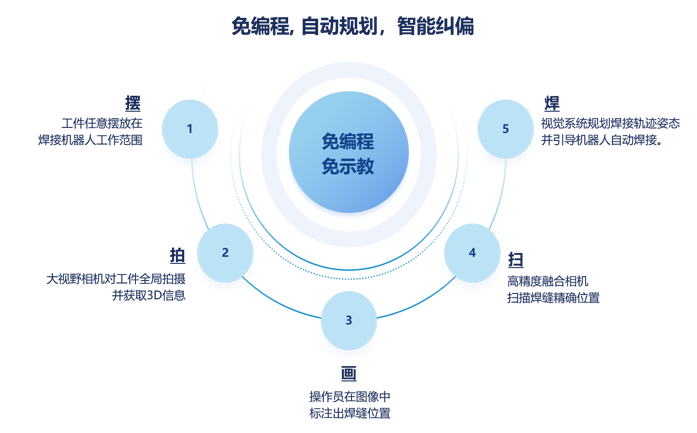
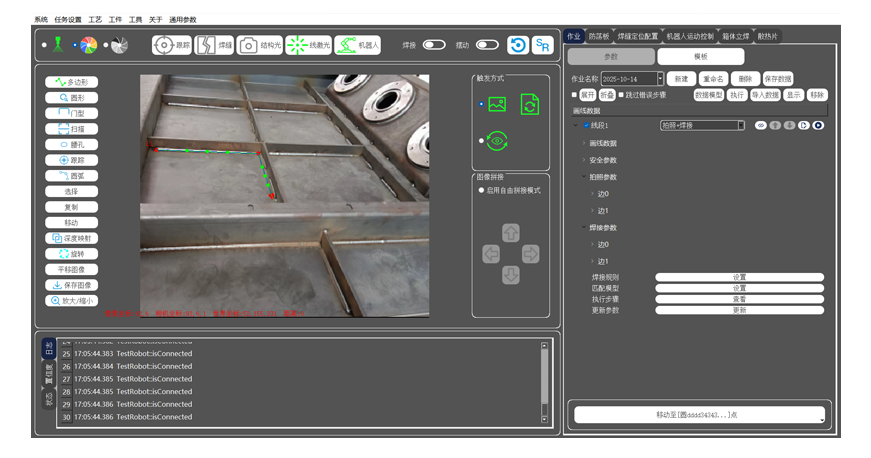
全圖形界面操作,無需機器人操作經驗,可輕松完成全部作業流程
全面兼容發那科,ABB,川崎,新松,埃斯頓,廣數等國內外主流焊接機器人品牌
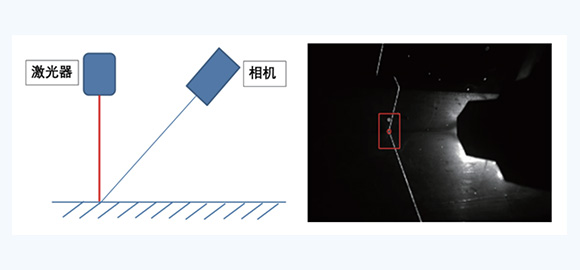
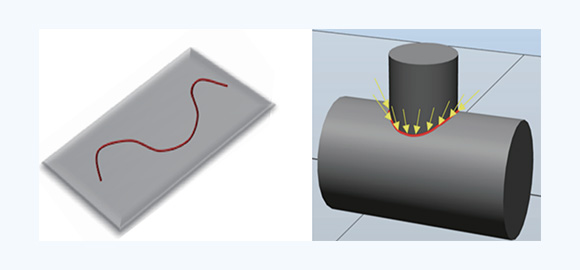
實時焊縫識別及定位:依據選定的焊縫類 型,實時對工作場景中出現的焊縫進行識別, 并輸出焊縫在相機坐標系內的坐標(X, Z)。
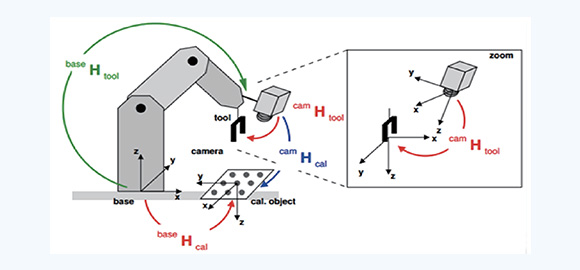
快速手眼標定及坐標轉換:利用系統所自 帶的快速手眼標定程序,快速建立視覺系統與 焊接機器人之間的坐標轉換關系,自動生成手 眼轉換矩陣,并將焊縫的相機坐標(X, Z)轉換 為可直接被機器人使用的世界坐標(X, Y, Z, ALPHA, BETA, GAMMA)。
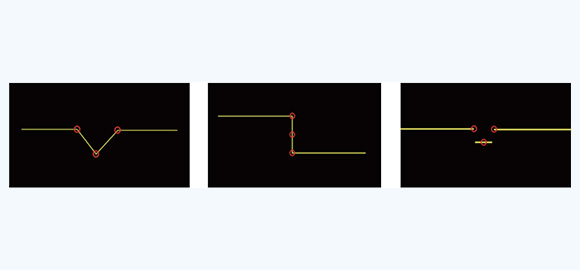
標準焊縫類型庫 :包括拼接 / 搭接 /V 型 / 內角 / 平板等。
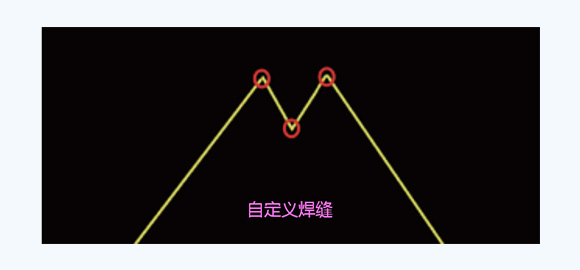
支持用戶自建非標焊縫類型 , 并指定特征點。
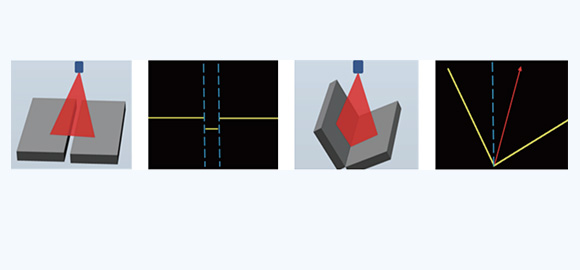
實時焊縫特征及空間數據:依據選定的焊縫類型, 實時輸出用于焊縫特征描述的關鍵數據,如寬度,深 度,高差,開口角度,法相方向等。
焊縫軌跡預測及機器人位姿規劃:根據當前焊 縫位置及機器人姿態,自動預測焊縫走向和位 置,以及與之對應的機器人位姿。(該功能應用于 無需示教 / 離線編程的全自動焊縫尋跡)。
產品結構圖
軟件界面及功能
視覺系統 + 焊接機器人 + 焊機 + 工裝變位機 + 操控臺 + 地軌等
視覺系統 + 焊接機器人 + 焊機 + 工裝變位機 + 操控臺

視覺系統 + 焊接機器人 + 焊機 +地軌 + 操控臺


